Diferència entre revisions de la pàgina «Robot versió 6»
Salta a la navegació
Salta a la cerca

| Línia 38: | Línia 38: | ||
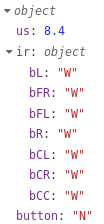
=== Recepció de les dades dels sensors === | === Recepció de les dades dels sensors === | ||
| + | |||
| + | [[Image:JsonSensors01.png|center|JsonSensors01.png]] | ||
| + | |||
| + | [[Image:JsonSensors02.png|center|JsonSensors02.png]] | ||
| + | |||
=== Transmissió de dades als actuadors === | === Transmissió de dades als actuadors === | ||
=== Activació dels actuadors en funció dels sensors === | === Activació dels actuadors en funció dels sensors === | ||
Revisió del 17:34, 25 set 2019
Contingut
Robot
Aquesta és la sisena versió del robot educatiu dissenyat conjuntament per Edco i els professors Carles Olivé i Jordi Binefa de l'Escola del Clot - Jesuïtes El Clot.
Aquest robot està pensat per a funcionar amb un Arduino Nano o una Raspberry Pi Zero W.
La darrera versió dels codis per a fer-lo funcionar són al dipòsit d'Arduino i al dipòsit de la Raspberry Pi.

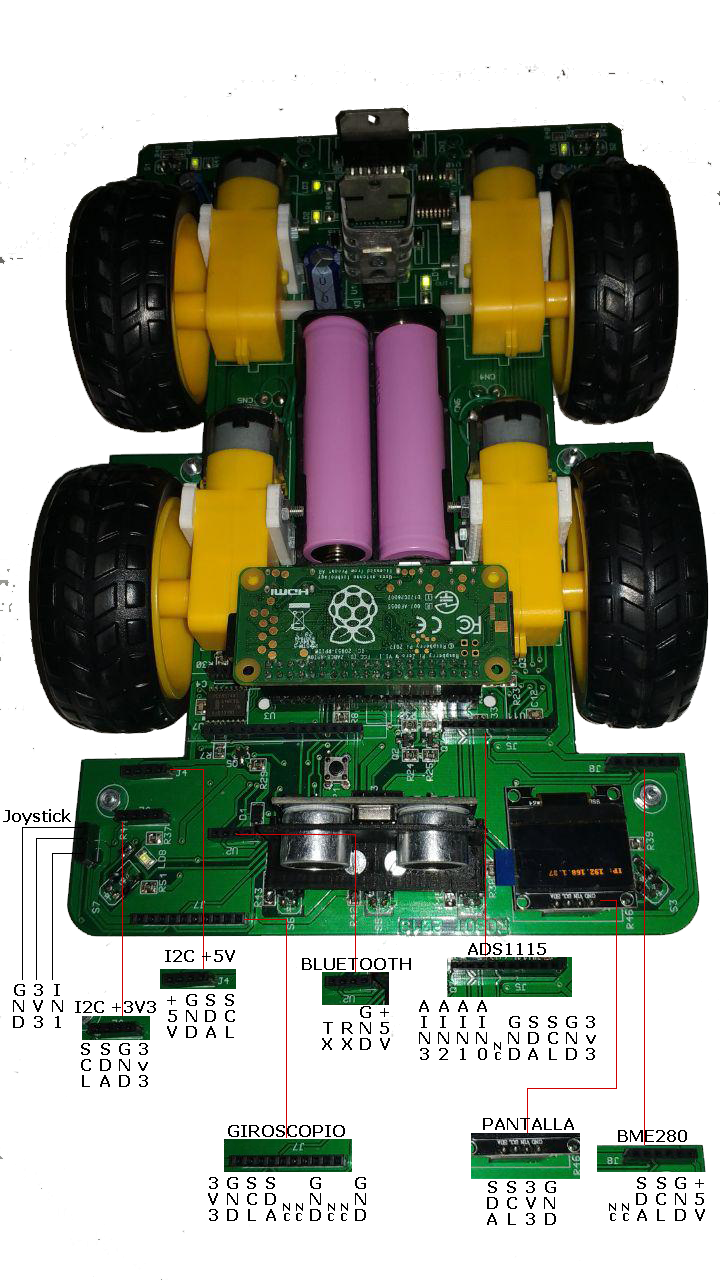
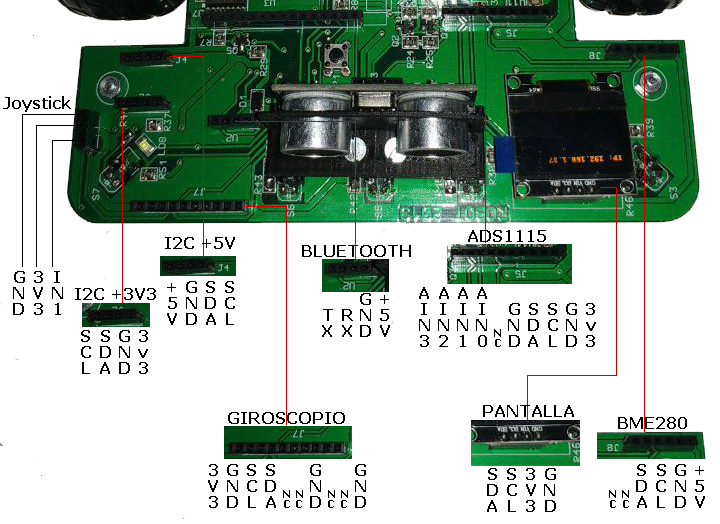
Connexions

Esborrany de l'esquema electrònic
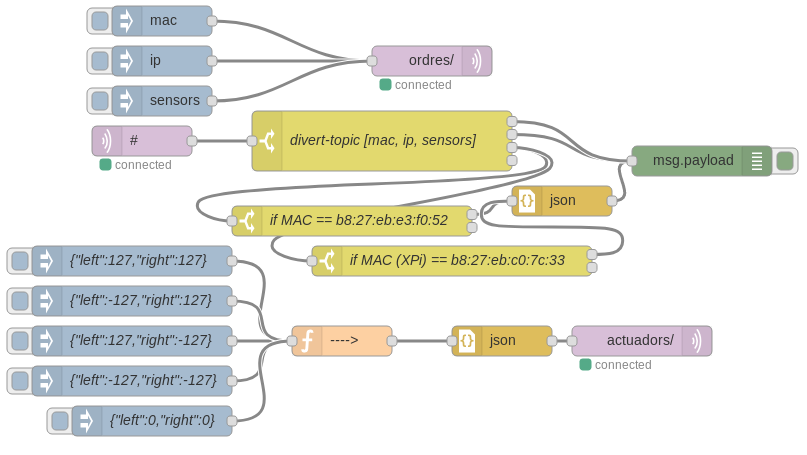
Control des del NodeRED i MQTT
NodeRED

Python
Interacció amb el maquinari
Inici i aturada del procés al rerefons
Per a fer la comunicació entre el maquinari i el NodeRED cal executar:
/home/pi/code/robot/robot_01.py
Altrament, també es pot executar des dels nodes del NodeRED:

Anomenem l'execució del codi com a procesUnic:
bash -c "exec -a procesUnic /usr/bin/python3 /home/pi/code/robot/robot_01.py"
I per a matar el procés pel nom procesUnic:
pkill -f procesUnic
Recepció de les dades dels sensors

